
Micro-/Nanorobots for Enhanced Antibacterial Treatment
Received date: 2022-12-30
Revised date: 2023-05-08
Online published: 2023-06-12
Supported by
National Natural Science Foundation of China(82001845)
Guangdong Provincial Key Lab of Robotics and Intelligent System(XDHT2019588A)
Shenzhen Science and Technology Program(JCYJ20190809163407481)
Bacterial infections, becoming the second leading cause of death in the worldwide, pose a serious threat to public health. Plenty of therapeutic strategies, such as antibiotic therapy, photothermal therapy, photodynamic therapy and sonodynamic therapy, etc., have been developed to treat bacterial infections. However, how to improve the efficiency of antibacterial therapy is still a great challenge. Micro-/nanorobots, as miniaturized robots with active motion properties, are promising to provide new therapeutic strategies for effective antibacterial. On the one hand, micro-/nanorobots can accurately deliver antibacterial media to the micro area of the lesion through their controllable directional movement. On the other hand, the motion of swarms of micro-/nanorobots can also cause mechanical effect and fluid stirring effects, which mechanically damage the pathogen and at the same time, promote the full reaction between pathogens and antibacterial media, so as to enhance the antibacterial efficiency synergistically. In this review, we summarize the important research advances of micro-/nanorobots in the field of antibacterial applications, and start from the driving mode of antibacterial micro-/nanorobots, systematically expounding the mechanism of action and application advantages in various antibacterial treatments. Finally, we discuss the potential challenges faced by micro-/nanorobots in antibacterial therapy and prospect the main directions of future research in this field.
1 Introduction
2 Driving mode of antibacterial micro-/nanorobots
3 Micro-/nanorobots in antibacterial application
3.1 Antibacterial agent delivery
3.2 Enhanced photothermal therapy
3.3 Enhanced photodynamic therapy
3.4 Mechanical disruption
3.5 Synergistic strategies
4 Conclusion and outlook

Ting Liu , Shiyao Pang , Xiaohui Yan . Micro-/Nanorobots for Enhanced Antibacterial Treatment[J]. Progress in Chemistry, 2023 , 35(7) : 997 -1004 . DOI: 10.7536/PC221231
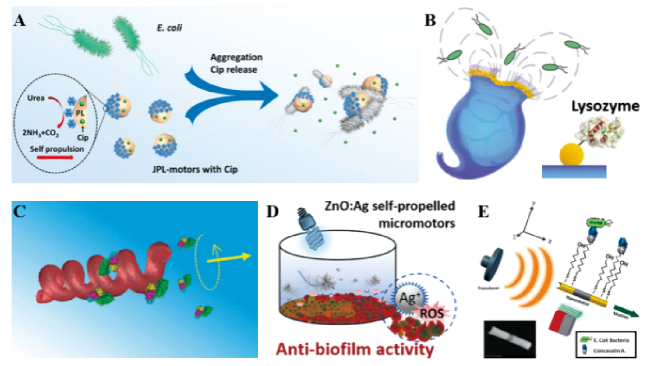
图1 (A)酶催化驱动的Janus血小板微米马达[25];(B)海洋轮虫驱动的溶菌机器人[32];(C)磁驱动的螺旋纳米机器人[44];(D)光催化驱动的ZnO:Ag微米马达[39];(E)超声驱动的金纳米线马达[42]Fig.1 (A) Urease-powered Janus platelet micromotors[25]. Copyright 2020, The American Association for the Advancement of Science; (B) rotifer based microrobots for enzymatic biodegradation of E. coli[32]. Copyright 2019, John Wiley and Sons; (C) magnetic powered helical nanorobots[44]. Copyright 2017, John Wiley and Sons; (D) light-driven ZnO:Ag micromotors[39]. Copyright 2021, John Wiley and Sons; (E) ultrasound-driven gold nanowire motors[42]. Copyright 2013, American Chemical Society |
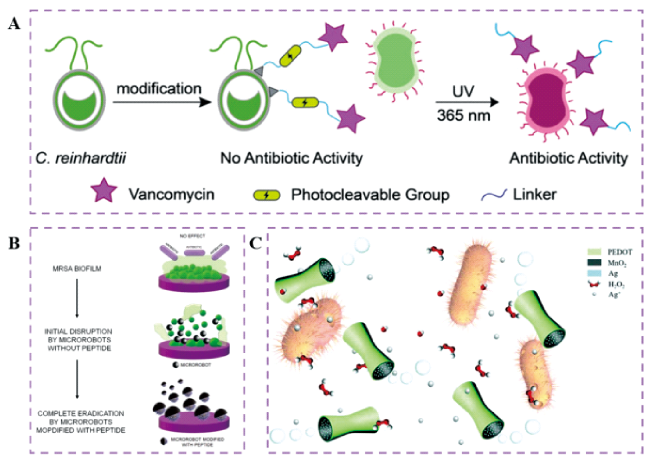
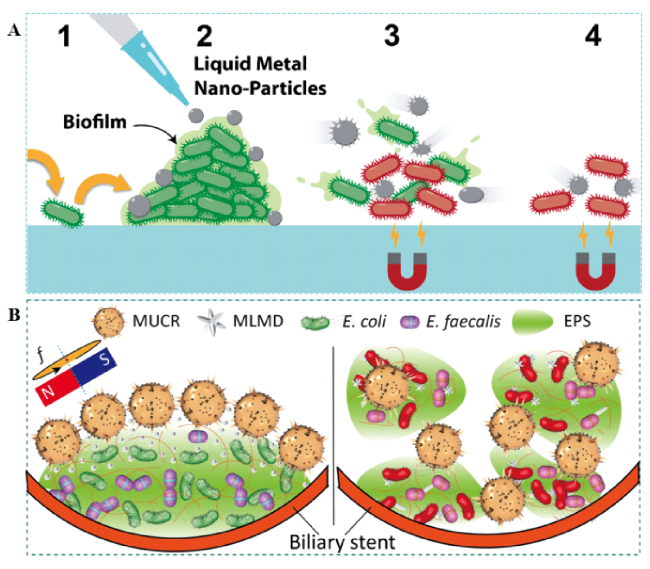
图2 (A)微藻机器人用于主动递送抗生素[30];(B)抗菌肽修饰的微型机器人用于去除MRSA生物膜[45];(C)PEDOT/MnO2管状微米马达用于增强的抗菌[26]Fig.2 (A) Microalgea robots for antibiotic delivery[30]. Copyright 2020, John Wiley and Sons; (B) antimicrobial peptide-modified microrobots for the eradication of MRSA biofilms[45]. Copyright 2022, John Wiley and Sons; (C) PEDOT/MnO2 tubular micromotors for enhanced antibacterial[26]. Copyright 2020, The Royal Society of Chemistry |
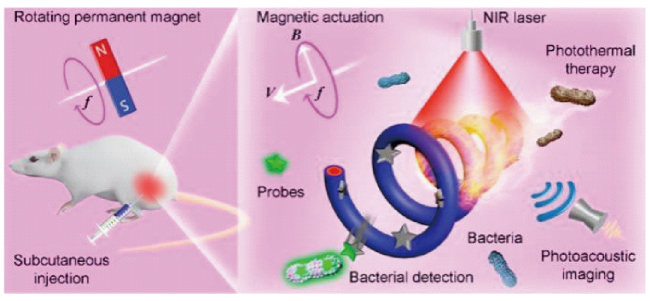
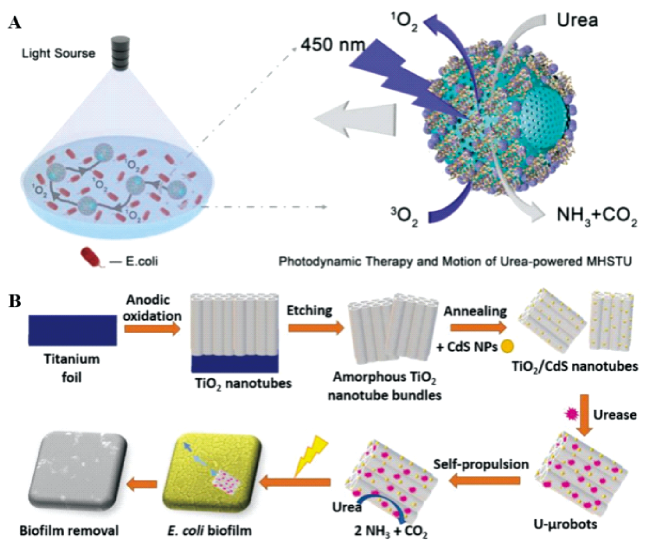
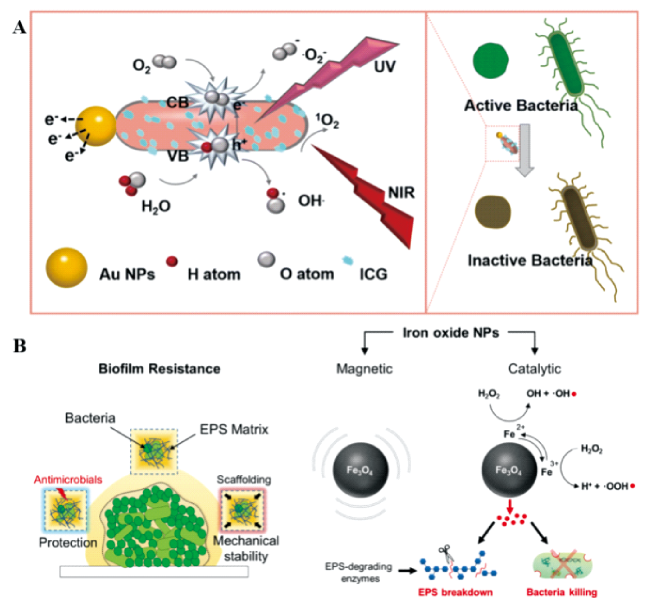
图6 (A)光热和光动力协同抗菌的 Janus纳米马达[63];(B)机械力协同ROS,药物清除生物膜的磁性抗菌机器人[64]Fig.6 (A) Janus nanomotors for killing bacteria with PTT and PDT[63]. Copyright 2022, The Royal Society of Chemistry; (B) magnetic antibacterial robots for removal of biofilm with mechanical force in collaboration with ROS and drug[64]. Copyright 2019, The American Association for the Advancement of Science |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}