
Research on GPR diagnostic system for hidden road defects based on YOLO
Received date: 2024-06-11
Online published: 2025-05-09
Copyright
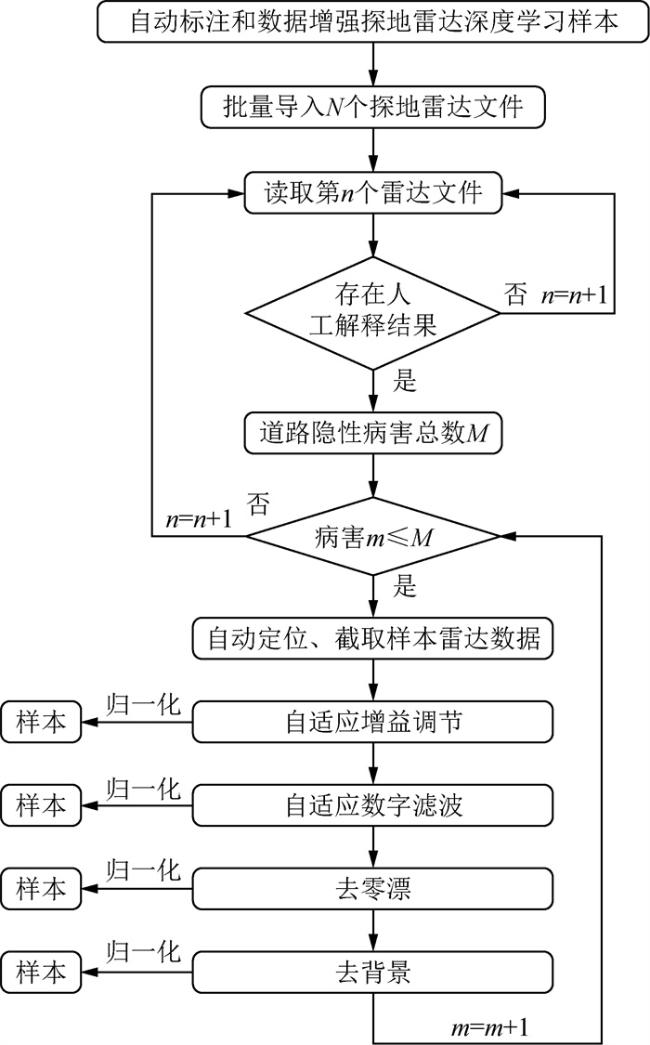
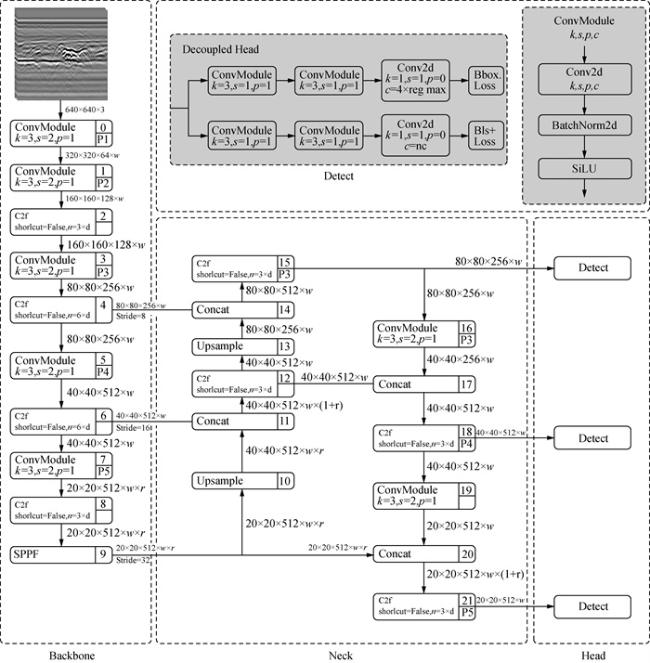
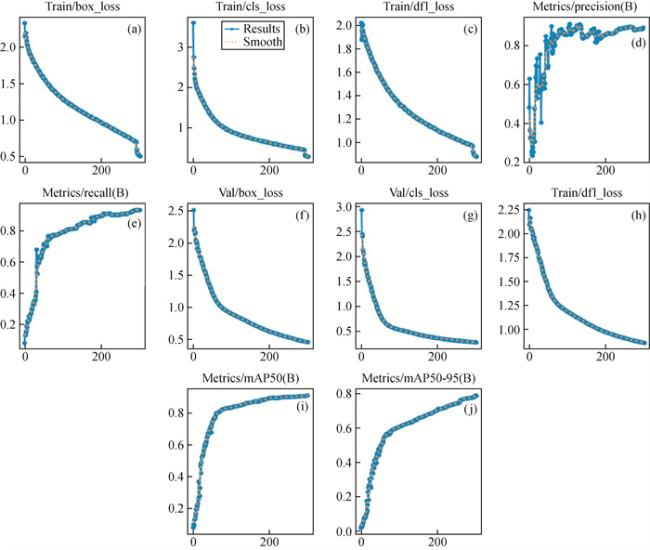
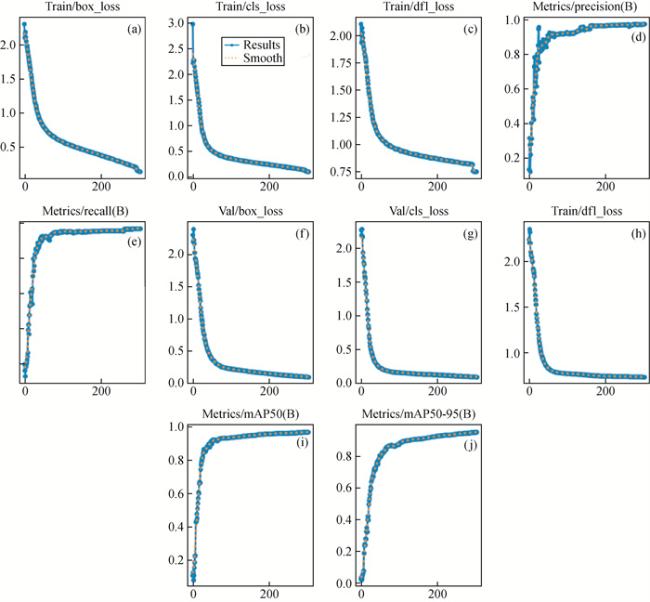
Currently, the manual method of annotating deep learning samples for Ground Penetrating Radar (GPR) with open-source tools such as LabelImg and Labelme is not only time-consuming and labor-intensive, but it also annotates images rather than radar data. This fails to satisfy the requirements of deep learning for large sample sizes and hinders the sharing and reuse of GPR data. It is essential to design a unified data storage format for the manual interpretation results of GPR data, establish a mapping relationship between hidden road defects and their GPR data, and enable autonomous retrieval, positioning, cropping, and automatic annotation of GPR data samples. Based on the YOLO network model, this study has developed an intelligent diagnostic software system for GPR images pertaining to hidden road defects. This system can automatically annotate GPR sample data pertaining to hidden road defects and implement methods such as adaptive gain adjustment, digital filtering, automatic zero drift removal, and background subtraction to enhance radar sample data, generating deep learning samples with different signal characteristics. Through a comparative analysis of the deep learning training performance of the YOLOv8n and YOLOv8x models on GPR samples pertaining to hidden road defects, a manual verification method for intelligent diagnostic results has been developed. The testing results of the algorithm and software reveal that automatic annotation and data enhancement of GPR data pertaining to hidden road defects can significantly expedite the generation speed of GPR deep learning samples and enrich the diversity of such samples. Compared with YOLOv8n, the YOLOv8x model achieves smaller training losses, higher training accuracy, and is more suited for intelligent diagnosis of GPR images pertaining to hidden road defects.
ShiLi GUO , WenCai CAI , PengFei TIAN , ZhiWei XU , Zheng CAO , HongYan ZHANG , ShiYuan LI . Research on GPR diagnostic system for hidden road defects based on YOLO[J]. Progress in Geophysics, 2025 , 40(2) : 827 -837 . DOI: 10.6038/pg2025II0151
表1 探地雷达人工解释结果数据格式Table 1 Data format for manual interpretation results of GPR |
| 行号 | 内容 | 说明 |
|---|---|---|
| 1 | M | 雷达数据中包含的总病害数 |
| 2 | 病害起始道数 | 病害1对应的雷达数据起始道 |
| 3 | 病害起始采样点数 | 病害1对应的雷达数据起始采样点 |
| 4 | 病害结束道数 | 病害1对应的雷达数据结束道 |
| 5 | 病害结束采样点数 | 病害1对应的雷达数据结束采样点 |
| 6 | 病害类型或编号 | 病害1的类型或编号 |
| …… | …… | …… |
| (n-1)×5+2 | 病害起始道数 | 病害n对应的雷达数据起始道 |
| (n-1)×5+3 | 病害起始采样点数 | 病害n对应的雷达数据起始采样点 |
| (n-1)×5+4 | 病害结束道数 | 病害n对应的雷达数据结束道 |
| (n-1)×5+5 | 病害结束采样点数 | 病害n对应的雷达数据结束采样点 |
| (n-1)×5+6 | 病害类型或编号 | 病害n的类型或编号 |
表2 训练参数Table 2 Training parameters |
| 参数类型 | Img-size | Batch-size | Momentum | Weight decay | Learning-rate | Epochs | Mosaic |
|---|---|---|---|---|---|---|---|
| 数值 | 512×512 | 32 | 0.937 | 0.0005 | 0.001 | 300 | True |
感谢审稿专家提出的修改意见和编辑部的大力支持!
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
新华社. 2023. 我国高速公路通车里程稳居世界第一. 中国政府网, https://www.gov.cn/lianbo/bumen/202311/content_6916724.htm.
|
|
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}