
Landmine detection of full-polarimetric ground penetrating radar based on SVM and PCSP
Received date: 2024-06-29
Online published: 2025-05-09
Copyright
In recent years, Full Polarimetric-Ground Penetrating Radar (FP-GPR) has been developed to enhance the recognition capabilities of GPR. In order to extract the polarimetric properties of the targets, many polarimetric decomposition techniques in Synthetic Aperture Radar (SAR) are applied to FP-GPR. H-Alpha decomposition can obtain two parameters, H and α, for classification. However, due to the differences in measurements between FP-GPR and SAR, the classic H-Alpha classification template in SAR may not be suitable for FP-GPR. This paper proposes to use the Support Vector Machine (SVM) and Particle Center Supported Plane (PCSP) to analyze and obtain the rules from the FP-GPR data and establish new classification criterion suitable for FP-GPR. The training and testing of four kinds of targets verified the feasibility of this two methods. Furthermore, the comparison about the accuracy of the two method was performed. Finally, the SVM and PCSP were applied to the landmine detection, and two new methods of landmine identification was proposed. The results of the two methods are compared.
HaoQiu ZHOU , Xuan FENG , ZeJun DONG , WenJing LIANG . Landmine detection of full-polarimetric ground penetrating radar based on SVM and PCSP[J]. Progress in Geophysics, 2025 , 40(2) : 838 -848 . DOI: 10.6038/pg2025II0184
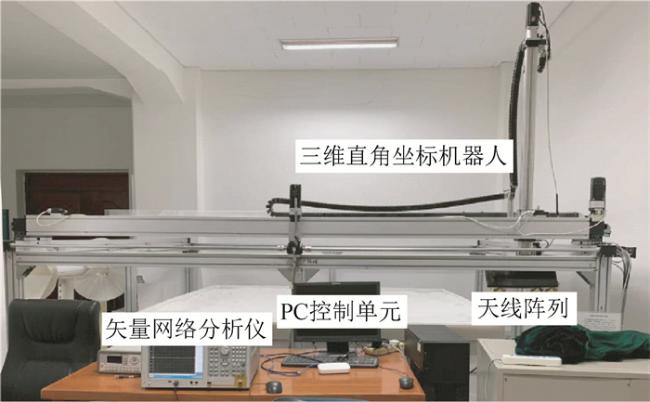
表1 测量参数Table 1 Measurement parameters |
| 频率/MHz | 测点数 | 点距/cm | 时窗/ns | 采样点数 |
|---|---|---|---|---|
| 800~4000 | 101 | 1 | 10 | 1024 |
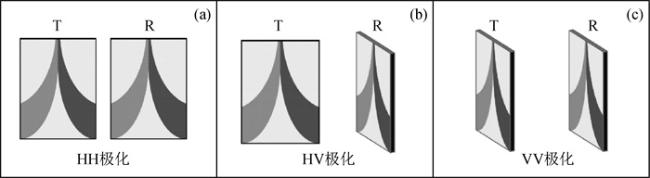
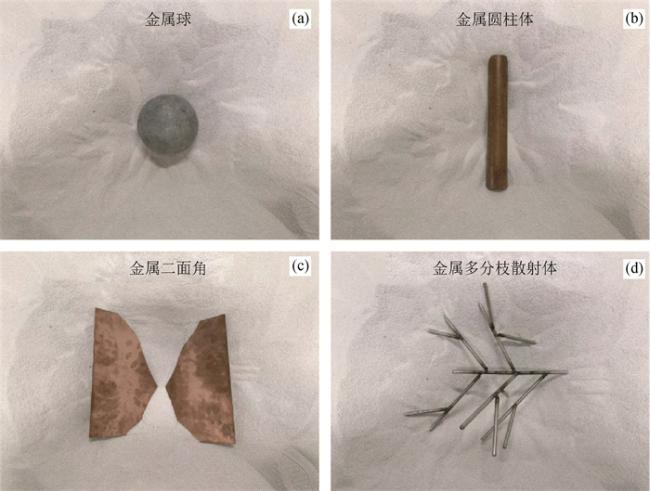
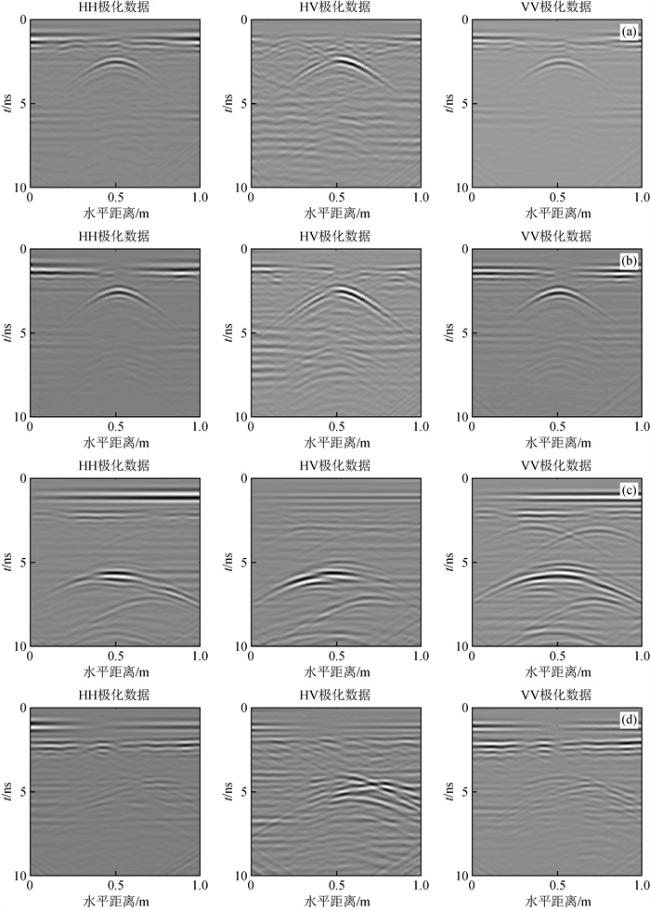
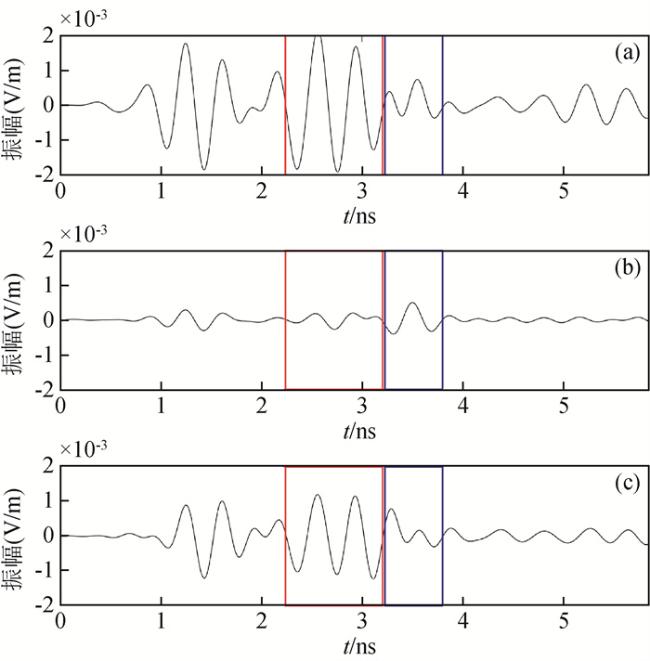
图6 四种典型目标体的全极化探地雷达数据(a)金属球的3种极化方式测量数据;(b)金属圆柱体的3种极化方式测量数据;(c)金属二面角的3种极化方式测量数据;(d)金属多分枝的3种极化方式测量数据. Fig 6 FP-GPR data of four typical targets (a)The measured data of metallic sphere with three types of polarization; (b)The measured data of metallic cylinder with three types of polarization; (c)The measured data of metallic dihedral with three types of polarization; (d)The measured data of metallic multibranch with three types of polarization. |
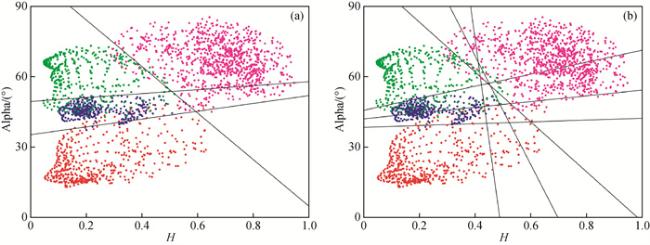
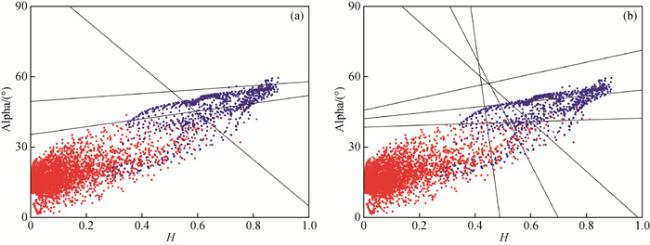
图7 SVM和PCSP训练结果(a)SVM训练结果;(b)PCSP训练结果.红点:金属球数据;蓝点:金属圆柱体数据;绿色:金属二面角数据;紫色:金属多分枝散射体数据 Fig 7 The training results of SVM and PCSP (a)The training result of SVM; (b)The training result of PCSP.Red points: data of metallic sphere; Blue points: data of metallic cylinder; Green points: data of metallic dihedral; Purple points: data of metallic multibranch. |
表2 SVM和PCSP分类方法正确率Table 2 The accuracy of SVM and PCSP |
| 方法 | 金属球的正确率/% | 金属圆柱体的正确率/% | 金属二面角的正确率/% | 金属多分枝的正确率/% |
|---|---|---|---|---|
| SVM | 90.99 | 81.29 | 77.89 | 92.74 |
| PCSP | 91.63 | 86.76 | 80.89 | 92.74 |
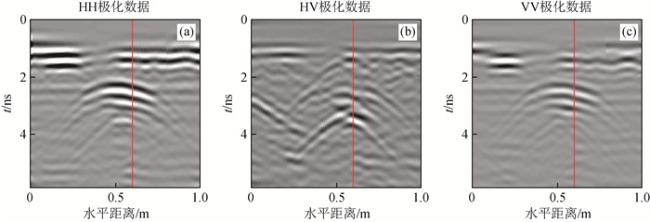
图9 实验测量得到72式反坦克地雷模型的雷达剖面Fig 9 The FP-GPR profiles of the type 72 anti-tanker landmine |
表3 测量参数Table 3 Measurement parameters |
| 频率/MHz | 测点数 | 点距/cm | 时窗/ns | 采样点数 |
|---|---|---|---|---|
| 800~4000 | 101 | 1 | 10 | 1024 |
图11 地雷表面及地雷内部数据SVM及PCSP分类结果(a)SVM分类结果;(b)PCSP分类结果.红点:地雷表面信号;蓝点:地雷内部信号. Fig 11 SVM and PCSP results of the surface and interior of the landmine (a)Result of SVM; (b)Result of PCSP.Red points: signals from landmine surface; Blue points: signals from landmine interior. |
表4 地雷表面及地雷内部的SVM和PCSP分类正确率Table 4 SVM and PCSP accuracy of the surface and interior of the landmine |
| 方法 | 目标区域 | 平面散射特征的概率/% | 线状体散射特征的概率/% | 二面体散射特征的概率/% | 体散射特征的概率/% |
|---|---|---|---|---|---|
| SVM | 地雷表面(红点) | 99.75 | 0.03 | 0.00 | 0.23 |
| 地雷内部(蓝点) | 24.07 | 8.77 | 0.00 | 67.16 | |
| PCSP | 地雷表面(红点) | 99.57 | 0.13 | 0.00 | 0.30 |
| 地雷内部(蓝点) | 18.33 | 7.31 | 0.00 | 74.36 |
感谢审稿专家提出的修改意见和编辑部的大力支持!
|
|
|
|
|
|
|
|
|
|
|
|
|
Daniels D J. 2005. Ground penetrating radar. //Encyclopedia of RF and Microwave Engineering. Washington: John Wiley & Sons.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kennedy J, Eberhart R. 1995. Particle swarm optimization. //International Conference on Neural Networks. Perth: IEEE, 1942-1948.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Zhou H Q, Feng X, Zhang Y, et al. 2018. Combination of support vector machine and H-Alpha decomposition for subsurface target classification of GPR. //17th International Conference on Ground Penetrating Radar (GPR). Rapperswil: IEEE, 635-638.
|
|
|
|
|
|
|
|
杜齐喜. 2007. 探地雷达在地雷探测中的应用研究[硕士论文]. 长春: 吉林大学.
|
|
|
|
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}