
Tonga volcanic in 2022 eruption monitoring based on spherical harmonic expansion precision single point positioning: the case of TONG at IGS station
Received date: 2023-06-05
Online published: 2025-08-28
Copyright
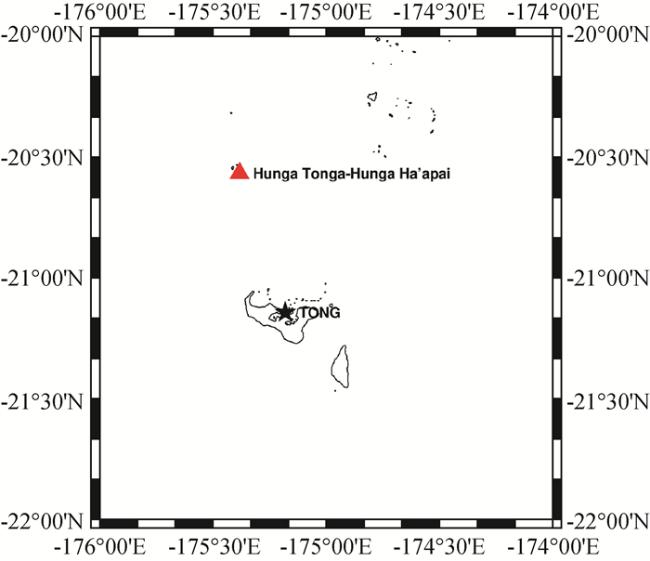
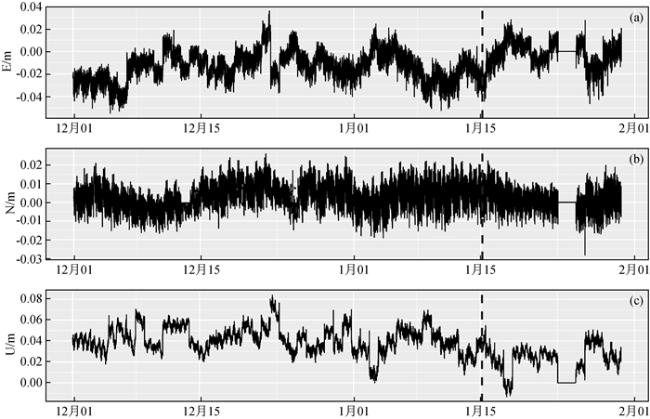
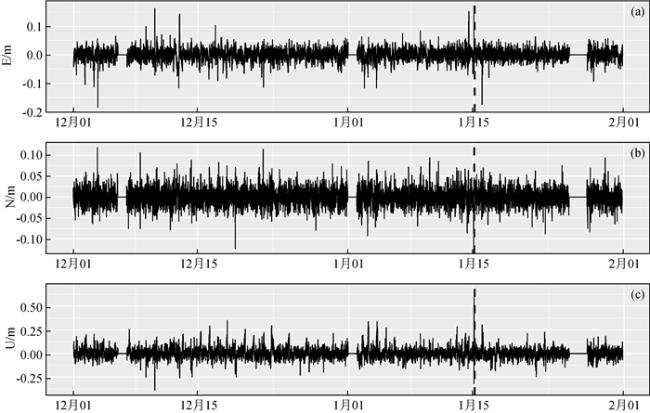
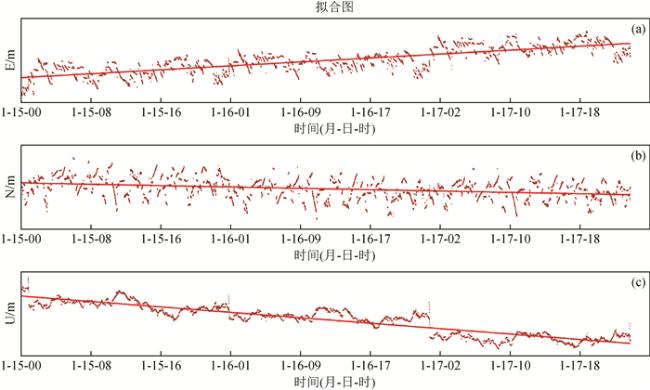
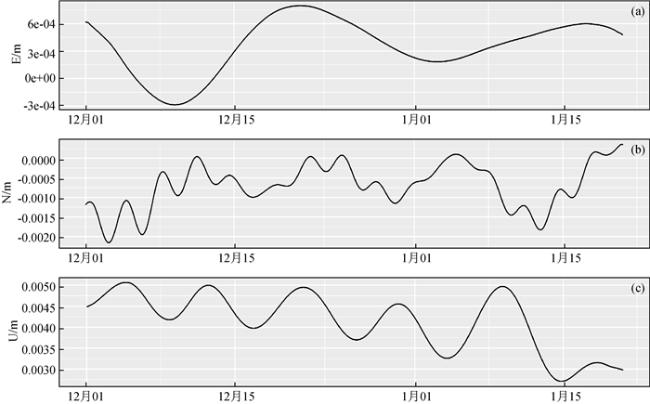
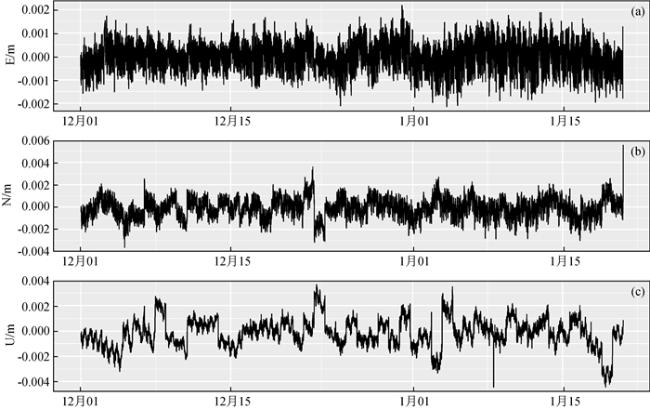
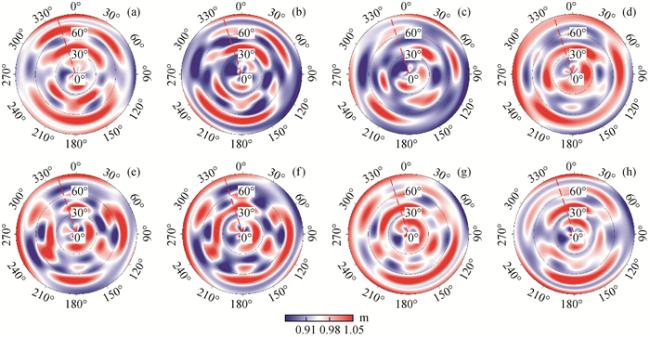
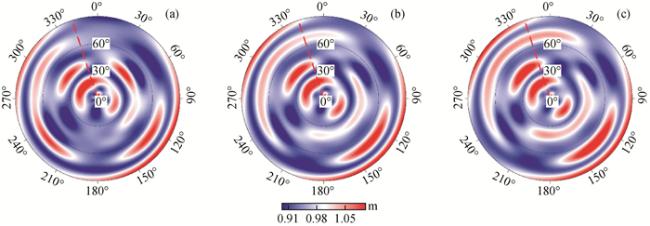
In January 2022, Tonga experienced a massive underwater volcanic eruption, causing significant impacts throughout the Pacific region. In this article, a precise positioning technique based on spherical harmonic expansion is used to decompose the errors along the propagation path of GPS signals. This technique allows for precise single-point positioning calculations of GPS data received at the TONG station within the Kingdom of Tonga. The results of these calculations are then utilized to study the response to the Tonga volcanic eruption.The TONG station's standard deviations in the East (E), North (N), and Up (U) directions are 1.32 cm, 0.63 cm, and 1.53 cm, respectively. During the volcanic eruption, the positional error time series data exhibits a noticeable response. In the computed coordinate time series data, there is a clear shift in the station's position after the volcanic eruption. By performing a fitting process, it is determined that the station moved in a southeast direction, with an eastward velocity of 0.0108 m/d, a southward velocity of 0.0023 m/d, and a downward velocity of 0.0149 m/d. By employing the Singular Spectrum Analysis (SSA) method to decompose the time series data, the principal components and residuals are obtained for each direction (E, N, U). In the E direction, as well as the U direction, there are noticeable periodic variations. The amplitude of the E direction is 0.045 cm, while the N direction has an amplitude of 0.05 cm. All three directions exhibit significant fluctuations around the time of the volcanic eruption, particularly around January 15th.The residuals in the N and U directions exhibit significant changes at the moment of the volcanic eruption. In particular, the U direction's residual decreased by 0.4 cm after the eruption compared to the pre-eruption stability. Additionally, the error correction of the propagation path, based on spherical harmonic expansion, shows a clear response to the errors caused by volcanic ash. The magnitude of these errors suggests that the volcanic ash has shifted in the southeast direction. Additionally, by analyzing the distribution of errors at different elevation angles, it is possible to observe the spread and ascent of volcanic ash. This demonstrates that this method can be employed for studying volcanic eruptions.
MingHao CHANG , JinYun GUO , HengYang GUO , XiaoTao CHANG , YanChen CAO . Tonga volcanic in 2022 eruption monitoring based on spherical harmonic expansion precision single point positioning: the case of TONG at IGS station[J]. Progress in Geophysics, 2025 , 40(4) : 1349 -1360 . DOI: 10.6038/pg2025HH0118
表1 5~8阶球谐展开TONG站解算结果Table 1 The results of TONG solved by PPP when spherical harmonic expanding to degree 5~8 |
| 阶数 | Max/m | Min/m | Mean/m | STD/m | RMS/m | |
|---|---|---|---|---|---|---|
| 5阶 | E | -0.0469 | -0.0035 | -0.0234 | 0.0070 | 0.0244 |
| N | -0.0142 | 0.0152 | -0.0002 | 0.0060 | 0.0059 | |
| U | 0.0411 | 0.0800 | 0.0776 | 0.0061 | 0.0579 | |
| 6阶 | E | -0.0424 | -0.0077 | -0.0242 | 0.0057 | 0.0249 |
| N | -0.0090 | 0.0119 | 0.0004 | 0.0044 | 0.0045 | |
| U | 0.0503 | 0.0720 | 0.0621 | 0.0043 | 0.0623 | |
| 7阶 | E | -0.0400 | -0.0137 | -0.0248 | 0.0048 | 0.0253 |
| N | -0.0074 | 0.0099 | 0.0008 | 0.0036 | 0.0037 | |
| U | 0.0565 | 0.0708 | 0.0646 | 0.0033 | 0.0647 | |
| 8阶 | E | -0.0354 | -0.0221 | -0.0277 | 0.0032 | 0.0278 |
| N | -0.0047 | 0.0077 | 0.0008 | 0.0030 | 0.0031 | |
| U | 0.0612 | 0.0678 | 0.0643 | 0.0018 | 0.0644 |
表2 TONG站点定位结果对比Table 2 The results of spherical harmonic expansion single point positioning of TONG |
| MAX | MIN | MEAN | STD | RMS | ||
|---|---|---|---|---|---|---|
| 球谐展开单点定位结果/m | E | 0.0358 | -0.0549 | -0.0105 | 0.0132 | 0.0169 |
| N | 0.0262 | -0.0490 | 0.0028 | 0.0063 | 0.0068 | |
| U | 0.1286 | -0.0134 | 0.0367 | 0.0153 | 0.0396 | |
| 内华达大地测量实验室点位结果/m | E | 0.1717 | -0.1845 | -0.0003 | 0.0183 | 0.0183 |
| N | 0.1188 | -0.1233 | 0.0006 | 0.0170 | 0.0170 | |
| U | 0.6814 | -0.3894 | 0.0022 | 0.0512 | 0.0513 |
感谢武汉IGS数据中心、IGS提供的观测数据、精密星历、精密钟差等文件,感谢内华达州大地测量实验室的时序数据,感谢RTKLIB提供的开源代码,感谢审稿专家提供的修改意见和编辑部的大力支持.
|
|
|
|
|
|
|
Dai L. 2002. Augmentation of GPS with GLONASS and pseudolite signals for carrier phase-based kinematic positioning[Ph. D. thesis]. Sydney: University of New South Wales, 126-129.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Shandong University of Science and Technology. 2022-03-11. GNSS single-point positioning method based on spherical harmonic expansion (in Chinese). China, CN113093242B.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
山东科技大学. 2022-03-11. 一种基于球谐展开的GNSS单点定位方法: 中国, CN113093242B.
|
|
|
|
|
|
|
|
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}