
Fabrication and Application of Liquid Crystal Elastomer Fibers
Received date: 2025-02-28
Revised date: 2025-04-08
Online published: 2025-09-05
Supported by
The National Natural Science Foundation of China(52173109)
The National Natural Science Foundation of China(52473107)
The Fundamental Research Funds for the Central Universities
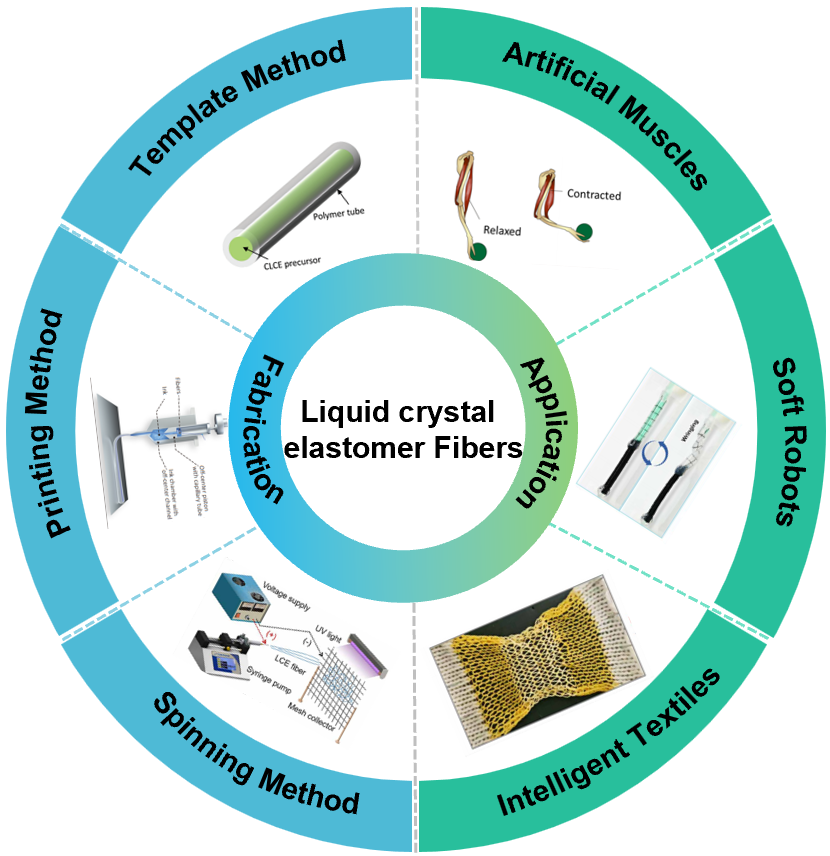
Liquid crystal elastomers (LCEs) are crosslinked polymer networks that combine the anisotropy of liquid crystals with the entropic elasticity of elastomers. They exhibit reversible large deformations under external stimuli, making them a focal point in smart materials research. Among various forms, LCE fibers, characterized by their high aspect ratio and large specific surface area, demonstrate enhanced sensitivity, greater deformation capacity, and excellent reversibility, weavability, and programmability, significantly broadening their application potential. In recent years, advancements in manufacturing technologies have expanded the fabrication methods of LCE fibers from traditional pulling and templating techniques to advanced spinning technologies such as melt spinning, electrospinning, wet spinning, and emerging 3D/4D printing techniques. These innovations have not only provided more possibilities for structural design and performance optimization of LCE fibers but also promoted their widespread use in high-performance material applications. This article systematically reviews the molecular structure and diverse fabrication methods of LCE fibers, discusses their applications in artificial muscles, soft robotics, smart clothing, and wearable devices, and provides an outlook on the future development of LCE fibers.
1 Introduction
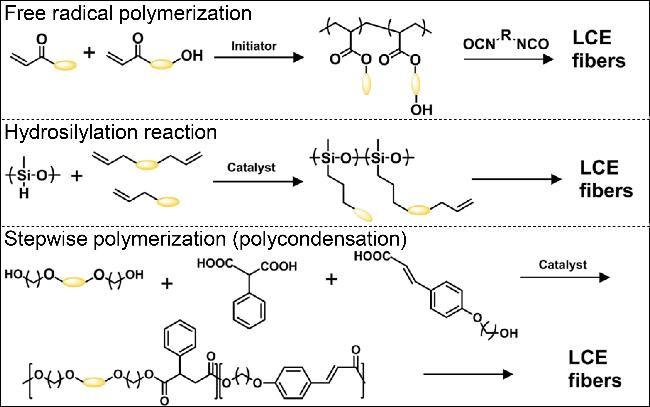
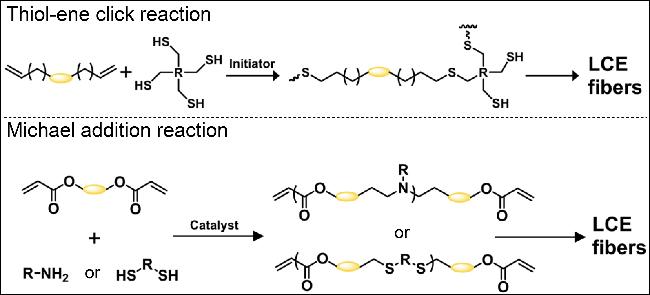
2 Molecular structures of liquid crystal elastomer fiber
3 Fabrication technology of liquid crystal elastomer fiber
3.1 Pultrusion method
3.2 Template method
3.3 Printing method
3.4 Spinning method
3.5 Microfluidic method
4 Application of liquid crystal elastomer fiber
4.1 Artificial muscles
4.2 Soft robots
4.3 Intelligent textiles
5 Conclusion and outlook
Key words: liquid crystal elastomer; fiber; soft robot; artificial muscle
Shan Yuanhang , Hu Jun , Wang Meng . Fabrication and Application of Liquid Crystal Elastomer Fibers[J]. Progress in Chemistry, 2025 , 37(9) : 1342 -1351 . DOI: 10.7536/PC20250211
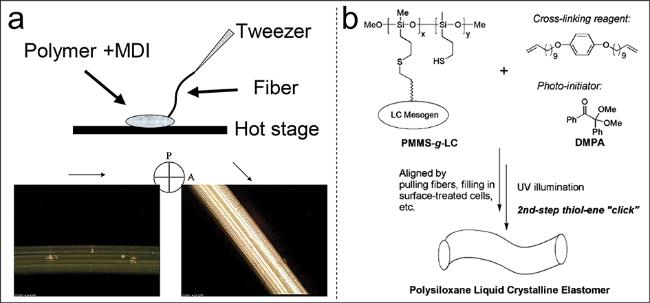
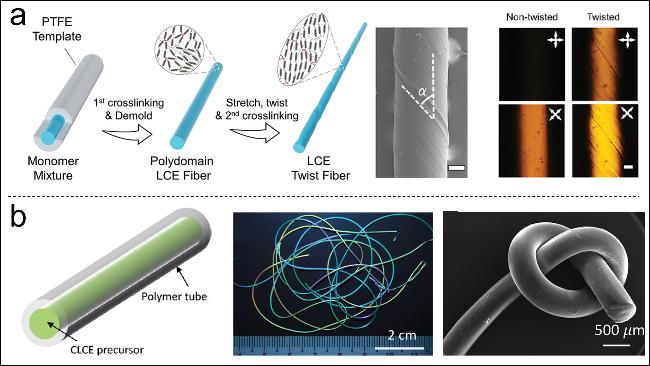
图3 (a)液晶弹性体纤维制备所用的装置以及液晶弹性体纤维在交叉偏振器下的显微照片[43];(b)通过巯基-烯反应制备液晶弹性体纤维[54]Fig.3 (a) Schematic of the setup used for the preparation of LCE fiber and microphotographs of LCE fiber under cross-polarizers[43]. Copyright 2003, American Chemical Society; (b) LCE fiber prepared by thiol-ene click reaction[54]. Copyright 2013, American Chemical Society |
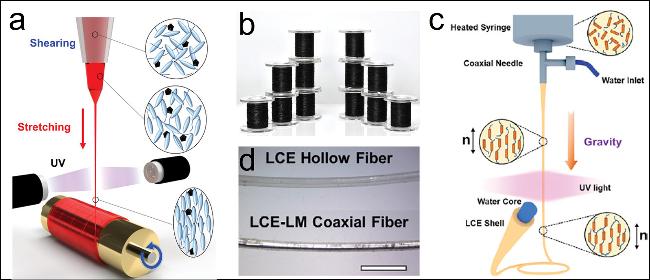
图5 (a)用于纤维成形和取向的加工系统示意图[23];(b)在线轴上收集的不同直径的液晶弹性体微纤维的图片;(c)通过改进的熔融纺丝方法制备LCE-水同轴纤维;(d)中空液晶弹性体纤维和LCE-LM同轴纤维放置在纸上的图像。比例尺:2 mm[59]Fig.5 (a) Schematic of the processing system for fiber shaping and orientation[23]. Copyright 2023, Wiley-Blackwell; (b) Photograph of LCE microfibers of different diameters collected on spools; (c) The scheme of extruding LCE-water coaxial fibers by a modified melt-spinning method; (d) Image of an LCE hollow fiber and an LCE-LM coaxial fiber placed on a paper. Scale bar: 2 mm[59]. Copyright 2022, Wiley-Blackwell |
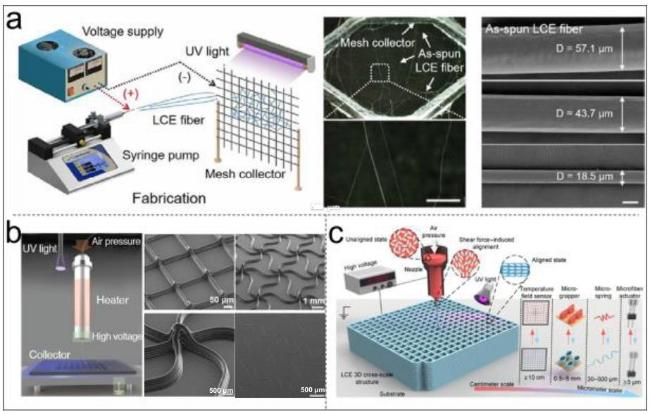
图6 (a)静电纺丝装置示意图及不同直径的液晶弹性体微纤维的光学图像和SEM图像[37];(b)CNT/LCE复合纱线的制备过程示意图[18];(c)3D MEW打印的液晶弹性体微纤维和3D跨尺度结构示意图[61]Fig.6 (a) Diagram of electrospinning device and optical and SEM images of LCE microfibers with different diameters[37]. Copyright 2021, American Association for the Advancement of Science; (b) Schematic of the preparation process of the CNT/LCE composite yarn[18]. Copyright 2023, Wiley-Blackwell; (c) Schematic of 3D MEW-printed LCE microfibers and 3D cross-scale structures[61]. Copyright 2024, American Association for the Advancement of Science |
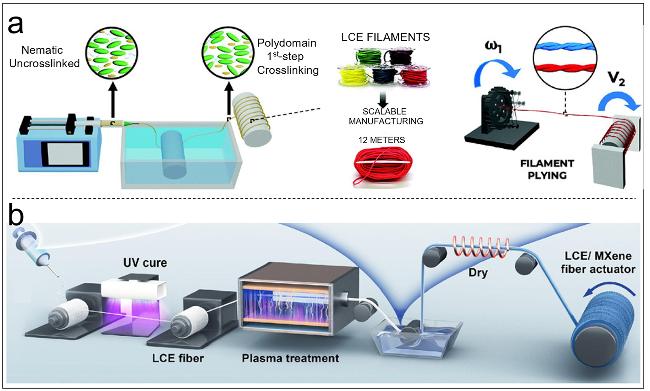
图7 (a)湿纺工艺的示意图和不同颜色染色的长达12 m的液晶弹性体长丝的图片以及用于制造单峰和双峰液晶弹性体长丝的合股工艺示意图[62];(b)LCE/MXene纤维的制备工艺示意图[38]Fig.7 (a) Schematic of the wet spinning process and photos of LCE filaments dyed in different colors up to 12 m long and schematic illustration of the plying process for fabrication of mono-modal and bi-modal LCE filaments[62]. Copyright 2024, Wiley-VCH Verlag; (b) Diagram of the manufacturing process of the LCE/MXene fiber[38]. Copyright 2023, Royal Society of Chemistry |
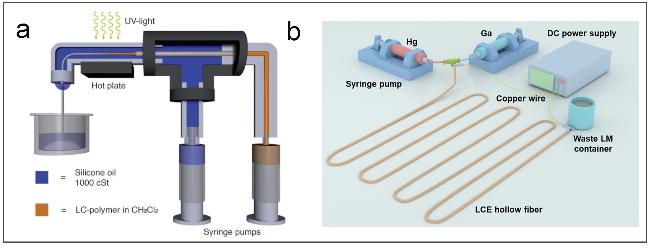
图9 (a)用于制备分散于硅油中的液晶弹性体纤维的微流控装置示意图[68];(b)液晶弹性体纤维制备所用的装置示意图[69]Fig.9 (a) Schematic of the microfluidic setup used to prepare LC-fibers dispersed in silicone oil. Copyright 2011, Royal Society of Chemistry[68]; (b) Schematic of the setup used for the preparation of LCE fibers[69]. Copyright 2024, American Chemical Society |
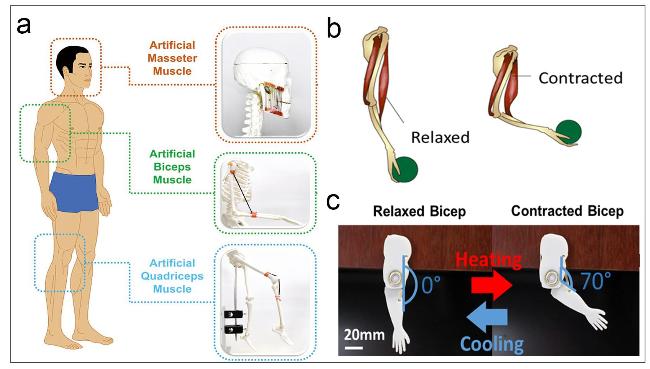
图10 (a)液晶弹性体微纤维在人体骨骼上作为咬肌、肱二头肌和肱四头肌的演示[23];(b)舒张和收缩肱二头肌纤维以实现提升运动的解剖示意图;(c)单根液晶弹性体纤维使机械臂实现70°的弯曲角度[73]Fig.10 (a) Demonstration of the implementation of LCE microfibers as masseter artificial muscle, biceps artificial muscle and quadriceps artificial muscle on a human skeleton[23]. Copyright 2023, Wiley-Blackwell; (b) Schematic of the anatomy of a relaxed and contracted bicep muscle fibers to achieve a lifting motion; (c) Activation of a single relaxed and contracted bicep muscle fiber using an LCE fiber achieving a 70° rotation angle[73]. Copyright 2019, American Chemical Society |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}