
Conductive Hydrogel-Based Flexible Mechanical Sensors: Material Design, Performance Mechanisms, and Multifunctional Applications
Received date: 2025-10-24
Revised date: 2025-12-10
Online published: 2026-03-05
Supported by
Xihua University Internal Talent Recruitment Program(ZX20250026)
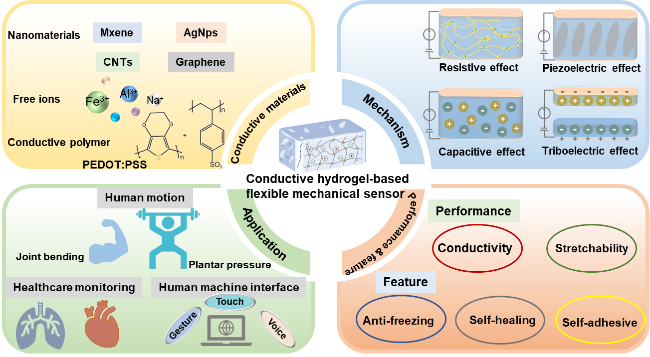
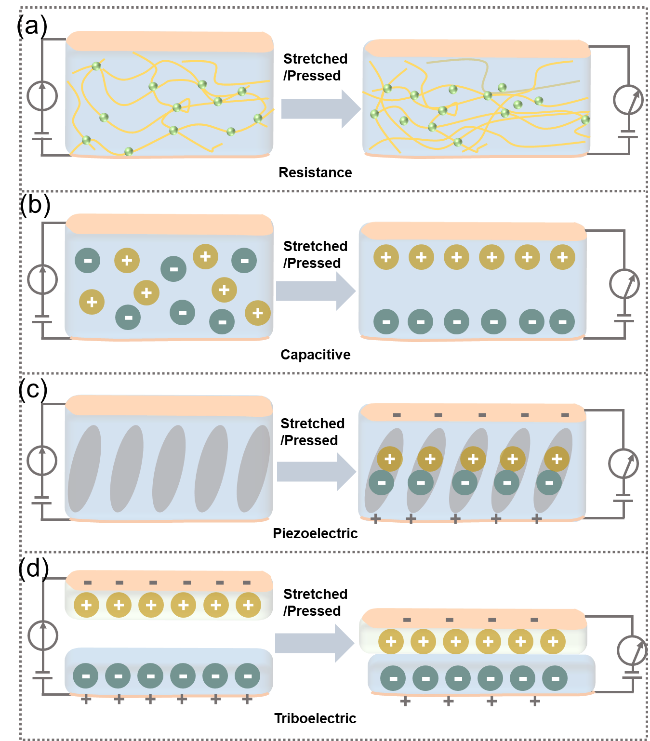
Flexible mechanical sensors (FMSs) show significant promise for applications including health monitoring, human motion tracking, electronic skin, and human-machine interaction, and have thus emerged as a key research area within flexible electronics and wearable technology. Hydrogels, with their outstanding stretchability, flexibility, and biocompatibility, offer conformal contact with tissues or skin for stable signal acquisition, making them a prime candidate for constructing FMSs. In recent years, the incorporation of different conductive materials has led to the development of various conductive hydrogels, thereby advancing multifunctional FMSs. This review summarizes recent progress in conductive hydrogel-based FMSs (CHFMSs), with a focus on constituent materials (e.g., conductive nanofillers, ionic additives, or conductive polymers), performance characteristics, and conductive mechanisms. A classification of FMSs based on the conduction mechanisms (resistive, capacitive, piezoelectric, and triboelectric) is also provided. Furthermore, the potential applications of FMSs in various practical scenarios are discussed. Finally, the key challenges and prospects in the developing field are outlined.
1 Introduction
2 Types of CHs
2.1 Nanocomposite-based CHs
2.2 Ionic-based CHs
2.3 Conductive polymer-based CHs
2.4 Hybrid CHs
2.5 Analysis of different types of CHs
3 Classification and performance of CHFMSs
3.1 Classification of CHFMSs
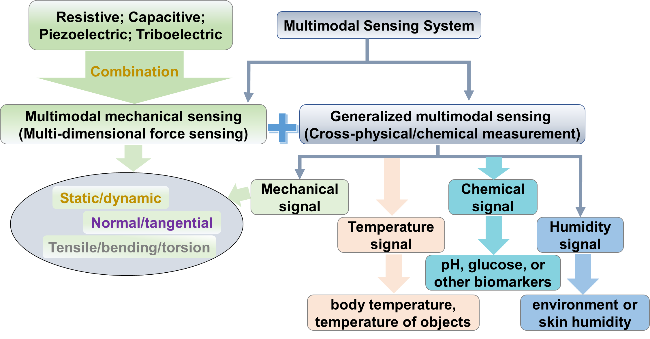
3.2 Multimodal sensing based on CHFMSs
3.3 Performance of CHFMSs
3.4 Interfacial engineering for CHFMSs
4 Application of conductive CHFMSs
4.1 Healthcare monitoring
4.2 Human motion monitoring
4.3 Human-machine interaction
5 Challenges and prospects
Zhiping Feng , Chenxing Xiang , Youran Qiu , Qiang He . Conductive Hydrogel-Based Flexible Mechanical Sensors: Material Design, Performance Mechanisms, and Multifunctional Applications[J]. Progress in Chemistry, 2026 , 38(3) : 479 -501 . DOI: 10.7536/PC20251010
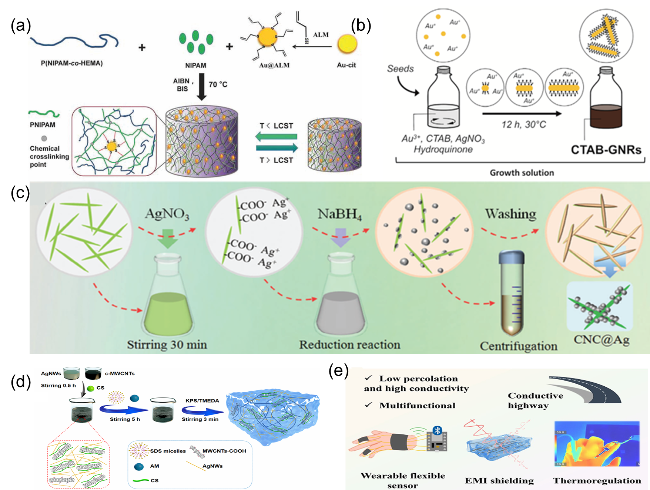
图2 金属纳米复合材料的导电水凝胶:(a) 采用金纳米粒子构建半互穿水凝胶网络[30];(b) 含金纳米棒的PHA/PGel导电水凝胶[31];(c) 原位还原法制备CNC@Ag复合材料[32];(d) PAM/c-MWCNTs@CS-AgNWs水凝胶传感器[36];(e) LM@CNTs-O水凝胶制备过程示意图[40]Fig.2 Metal nanomaterial-based CHs. (a) Constructing semi-interpenetrating hydrogel networks with AuNPs[30]. Copyright 2022, Wiley. (b) PHA/PGel conductive hydrogel with GNRs[31]. Copyright 2022, Wiley. (c) The fabrication of CNC@Ag via the in situ reduction method[32]. Copyright 2022, Wiley. (d) Formation of the PAM/c-MWCNTs@CS-AgNWs hydrogel sensors[36]. Copyright 2023, American Chemical Society. (e) Schematic of the preparation process of LM@CNTs-O hydorgel[40]. Copyright 2024, American Chemical Society |
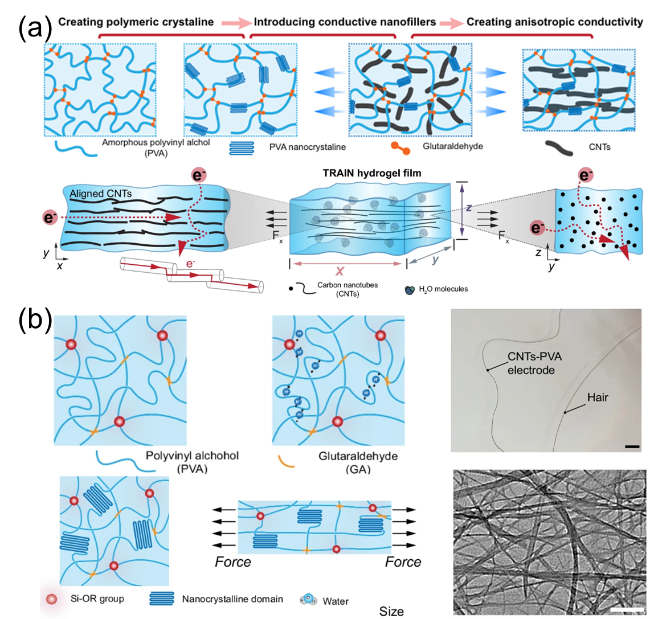
图3 碳纳米材料导电水凝胶:(a) 不同相态下CNT-PVA水凝胶的微观结构及导电机制示意图[47]; (b) CNT-PVA水凝胶网络发生非晶-晶体转变的示意图[51]Fig.3 Carbon nanomaterial-based CHs. (a) Schematics of microstructures and conductivity mechanisms in CNTs-PVA hydrogel under different phases[47]. Copyright 2025, Springer Nature. (b) Schematic illustration of CNT-PVA hydrogel network with amorphous-crystal transition[51]. Copyright 2024, Springer Nature |
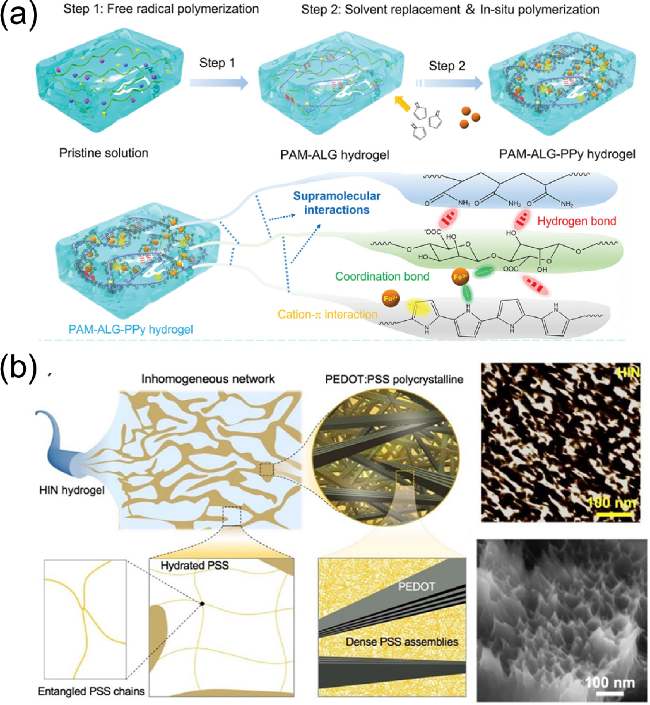
图6 导电聚合物水凝胶:(a) 两步聚合法制备PAM-ALG-PPy超分子水凝胶[71]; (b) 由水合PSS相和PEDOT:PSS多晶相组成HIN水凝胶[72]Fig.6 Conductive polymer-based CHs. (a) The preparation of PAM-ALG-PPy supramolecular hydrogel by two-step polymerization[71]. Copyright 2023, Wiley. (b) The HIN hydrogel, comprising a hydrated PSS phase and a PEDOT:PSS polycrystalline phase[72]. Copyright 2025, Wiley |
表1 不同类型水凝胶比较Table 1 Comparison of different types of CHs |
| Types | Conductive materials | Advantages | Challenges | Ref |
|---|---|---|---|---|
| Nanocomposite | metal nanomaterials (e.g., AgNWs, AuNPs) | excellent intrinsic conductivity, facile surface functionalization, high sensitivity | prone to oxidize or aggregate, stress concentration, high cost | 30,36 |
| carbon nanomaterials (e.g., CNTs, graphene) | high stability, high specific surface area, tunable electrical properties, mechanical reinforcement | hydrophobic nature leads to poor dispersion in aqueous matrix | 45-46 | |
| MXene (e.g., Ti3C2Tₓ) | high conductivity, hydrophilic surface for easy processing | susceptible to oxidative degradation in water/air, poor long-term stability | 54-55 | |
| Ionic | Fe3+, ionic liquid | simple preparation, good biocompatibility | poor mechanical strength, susceptibility to dehydration, unstable conductivity | 60 |
| Conductive polymer | PANi, PEDOT:PSS | high, conductivity, easy dispersion | poor stability | 79-80 |
| Hybrid | PANi/graphene, Mxenes/EGaIn | superior overall performance | complex synthesis, compatibility issues | 81-82 |
表2 基于四种机理的柔性力学传感器主要特性Table 2 The main characteristics of FMSs based on the four mechanisms |
| Types | Signal | Advantages | Challenges | Ref |
|---|---|---|---|---|
| resistive | resistance change (ΔR) | simple structure; intuitive signal readout | temperature interference; long-term stability | 104 |
| capacitive | capacitance variation (ΔC) | pressure-sensitive; fast response | susceptible to electromagnetic interference; complex circuit | 105 |
| piezoelectric | voltage/charge | fast response; wide frequency range | limited material options; poor response to static loads | 106 |
| triboelectric | voltage/current | multiple operating modes; materials readily available | poor static force response; significant environmental impact | 106 |
表3 基于导电水凝胶的柔性力学传感器类型与性能总结Table 3 Summary of types and performance of CHFMSs |
| Sensor type | Active materials | Mechanism | Performance | Features | Application | Ref | |
|---|---|---|---|---|---|---|---|
| mechanical | sensitivity | ||||||
| Strain sensor | p(SBMA‑co-AA)/CS/Cit | resistive | stretchability: 800% Recovery efficiency: 90% | GF: 2.93 (0~150%) | self-heal, self-adhesive, transparent | human motion monitoring | 88 |
| p(AN‑co-Am)/HPMC/ZnCl2 | resistive | stretchability: 1730% Toughness: 1.07 MJ/m3 | GF: 1 (0~100%) | anti-freeze | human motion monitoring | 116 | |
| P(AM-AA))/gelatin/glycerol-Al3+ | capacitive | stretchability: 1412.96% | GF: 5.81 (0~100%) | anti-freeze, transparent (80%); moisturizing | human motion monitoring | 117 | |
| PVA/Mxene/PPy | capacitive | stretchability: 4300% | GF: 1.0 (0~400%) | self-heal, self-adhesive | joint movements, facial expressions, and pulse waves | 118 | |
| PVA/PAA/Zr4+ | resistive/capacitive | stretchability: 2053% | Resistive GF:3.5 (0~600%), 9.9 (600%~1300%), Capacitive GF: 0.097 (0~900%) | self-heal, transparent | human activity monitoring, human-machine interaction | 114 | |
| PEDOT:PSS/gelatin | triboelectric | tensile strength: 7.38 MPa Stretchability: 150% | 1.29(0~120%) | anti-freeze | human movement monitoring | 115 | |
| Strain/ pressure sensor | alginate/PAM/Fe3+/Li+ | resistive/ capacitive | stretchability: 500% tensile strength: 1.9 MPa tensile elastic modulus 4.2 MPa | GF:4.06 MPa-1 (0~0.2 MPa),0.55 MPa-1 (>0.2 MPa) GF:2.59 (0~100%) | anti-freeze | plantar pressure, tire pressure | 94 |
| Pressure sensor | dicarboxylic cellulose/PAM/borax | resistive | compressive strength 935 kPa compressive strain 100% | GF:0.888(<12.5%),1.33(12.5%~50%),1.04(50%~80%) | self-bonding,self-healing | hand gestures and facial expressions | 119 |
| p(ethylacrylate costyrene)/[EMIM][TFSI] | capacitive | cyclic durability: 6000 cycles | 152.8 kPa-1 (0~400 kPa) | / | human motions monitoring | 120 | |
| PAM/CA/LiBr | triboelectric | cyclic durability 1000 cycles | 17.32 mV/Pa (0~6 kPa) | anti-freeze, anti-dehydrating, transparent (85%) | human-machine interfaces | 99 | |
| AM/acrylonitrile (AN)/polyacrylonitrile (PAN) | piezoelectric | tensile strength: 0.51 Mpa; cyclic durability: 1000 cycles | 0.2 V/kPa (<75 kPa) | / | joint bending, walking, running, and stair climbing | 97 | |
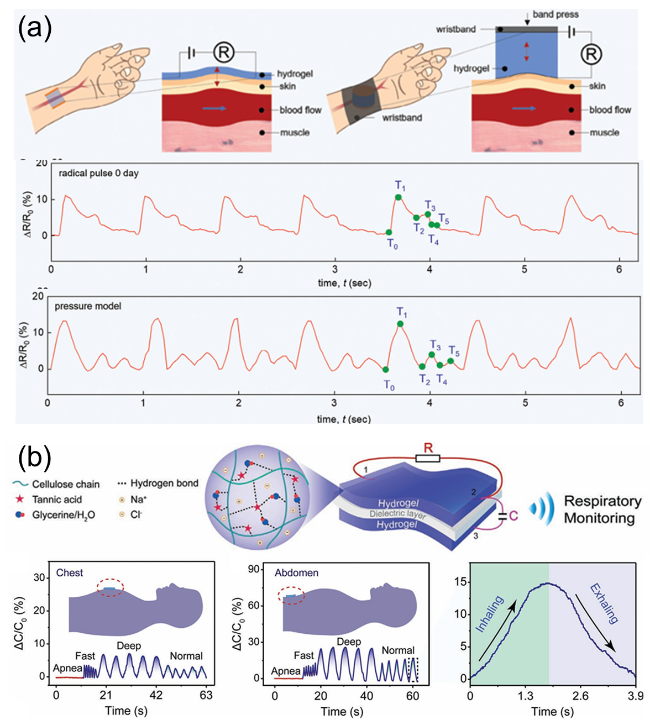
图10 CHFMSs的生理监测:(a) SFH电阻传感器无压力和压力下的动态脉搏监测[141];(b) 双交联纤维素水凝胶传感器进行的呼吸监测[142]Fig.10 Physiological monitoring of CHFMSs. (a) Radical pulse monitoring by SFH resistive sensor, no pressure and under pressure[141]. Copyright 2025, Wiley. (b) Respiration monitoring by a dual-crosslinked cellulose hydrogel sensor[142]. Copyright 2022, Wiley |
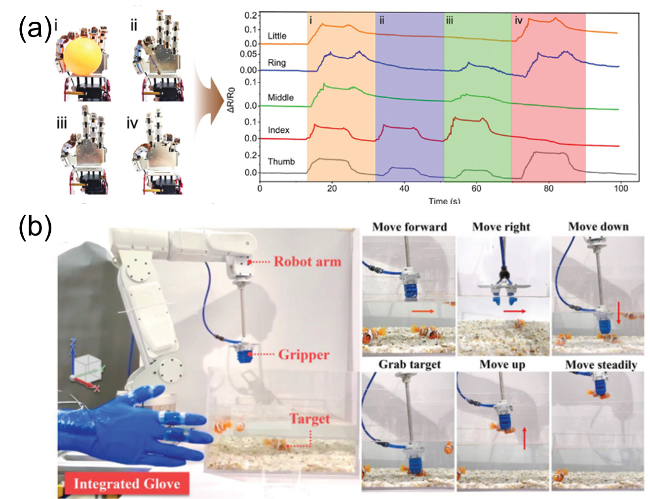
图12 导电水凝胶柔性力学传感器的人机交互中应用:(a) 机器人手背部集成五个水凝胶电阻式应变传感器[150];(b) 控制机械臂抓取水下物体示意图[151]Fig.12 HMI application of CHFMSs. (a) The robot hand is integrated with five hydrogel-based resistive strain sensors on the back of fingers[150]. Copyright 2024, Wiley. (b) Controlling the gripper of the robotic arm to grab underwater objects[151]. Copyright 2023, Wiley |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
|
| [82] |
|
| [83] |
(齐琨, 代云玲, 欧康康, 王梦婷, 苏宇, 王鸿博. 化学进展, 2024, 8(36): 1269.)
|
| [84] |
(鲍艳, 许佳琛, 郭茹月, 马建中. 化学进展, 2023, 5(35): 709.)
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
|
| [97] |
|
| [98] |
|
| [99] |
|
| [100] |
|
| [101] |
|
| [102] |
|
| [103] |
|
| [104] |
|
| [105] |
|
| [106] |
|
| [107] |
|
| [108] |
|
| [109] |
|
| [110] |
|
| [111] |
|
| [112] |
|
| [113] |
|
| [114] |
|
| [115] |
|
| [116] |
|
| [117] |
|
| [118] |
|
| [119] |
|
| [120] |
|
| [121] |
|
| [122] |
|
| [123] |
|
| [124] |
|
| [125] |
|
| [126] |
|
| [127] |
|
| [128] |
|
| [129] |
|
| [130] |
|
| [131] |
|
| [132] |
|
| [133] |
|
| [134] |
|
| [135] |
|
| [136] |
|
| [137] |
|
| [138] |
|
| [139] |
|
| [140] |
|
| [141] |
|
| [142] |
|
| [143] |
|
| [144] |
|
| [145] |
|
| [146] |
|
| [147] |
|
| [148] |
|
| [149] |
|
| [150] |
|
| [151] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}